Forget self-driving cars, the robot can get in and drive for you – if it can overcome some major limitations

The jury’s split on self-driving cars; some can’t wait for the autonomy and others fear that these cars will never be as good as human drivers. There’s a different camp, though, favoring robots that can get in any car and drive for you.
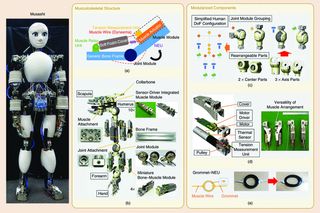
A new research paper, Toward Autonomous Driving by Musculoskeletal Humanoids: A Study of Developed Hardware and Learning-Based Software details work by the University of Tokyo, Japan Assistant Professor Kento Kawaharazuka and a team of researchers on a flexible, humanoid robot that can climb into any car and use the steering wheel, gas, and brake pedals much as a person would.
The robot, called Musashi, has a face, sensors to see the road, and, more importantly, 74 muscles and 39 joints. That doesn’t even include its articulated hands.
The concept of robots driving cars (as opposed to robot cars) is not as radical as you think. Almost a decade ago, I attended the DARPA Robotics challenge, for which a collection of humanoid robots (mostly Boston Dynamics Atlas models) had to complete a series of tasks: opening a door, using tools, climbing over uneven terrains, walking up a flight of stairs, and driving a vehicle. As I recall, only one robot made it through all the tasks, and what it managed behind the wheel scarcely resembled driving.
As Professor Kawaharazuka notes in the research paper:
“Because the humanoid robot lacks body flexibility and deviates from human body proportions, in the [Darpa Robotics Challenge], a steering wheel was operated by one arm and a special jig was required for sitting down on the seat.”
I do remember the nob on the DARPA Challenge vehicle steering wheel and how each robot would attempt to use its gripper to turn the car, essentially a dune buggy, if they could even get inside.
To solve the issues of entry and then control of the most common automobile parts, Kawaharazuka and his team built a different kind of robot. “The musculoskeletal humanoid is actuated not by motors arranged at each axis but by pneumatic actuators or muscle actuators with motors that imitate human muscles,” he wrote.
Put another way, Musashi is designed to mimic human psychology since that’s what all cars are designed to accommodate. The key here is not just flexibility but how the robot’s actuators can apply stiffness when necessary (think of the tension in your own body as you use the brake and gas pedals, adjust the mirrors, turn on the windshield wipers, and even just sit upright in the driver’s seat).
Musashi is designed to operate a car in all the ways a human would. It can pull the handbrake, adjust mirrors (it uses vision sensors to see objects and people), and set the turn signal.
In some ways, the tests were successful. While the robot could not yet get into the car on its own, it did press the gas pedal, use the brake, turn the steering wheel, and drive around the University of Tokyo campus without incident.
Unfortunately, there were also numerous issues. Musashi couldn’t seem to grip the steering wheel and instead pressed its hands against it. Steering was more of a push-and-pull operation, no hand-over-hand turns.
Researchers also want to integrate acoustic information better. Misahsi could recognize the sound of a car horn but could not differentiate audio from within the car (like passenger conversations) from engine sounds.
They also designed Musashi to drive on a flat even surface, which does not describe most roads, so the robot struggled to maintain any kind of speed. Between that and the difficulty of properly assessing how hard to press gas pedal, Musahi’s rides were never faster than 5 mph.
Just imagine getting stuck behind this guy on the freeway.
There is no timetable for bringing Musashi to a car near you. Instead, Kawaharazuka and company recommend further study. “For autonomous driving by humanoids in the future, we would like to develop the next hardware and software using the obtained knowledge”



