Tata Elxsi – Cloud Native & Environment Parity: Essential Paradigms for SDV

Software-defined vehicles (SDVs) represent the transition from conventional mechanical-based systems to a software-driven approach.
In a conventional vehicle, the hardware and software are closely coupled, so the features and performance remain the same throughout the vehicle’s operational life. Unlike current vehicles, SDV decouples the hardware and software parts of the vehicle, allowing it to continuously add, update, enable and disable features and services through an over-the-air (OTA) concept. This enables vehicles upgrades throughout their lifetime. These features help to customise the vehicle settings basis the demands of the end-user, resulting in an enhanced personalised driving experience. Moreover, SDVs offer better computing capabilities for efficient data processing within the vehicle. It also provides diagnostic services that continuously monitor functionalities and detects errors early without the need to consult any service specialists.
For effective SDV implementation, it’s crucial to utilize cloud-native technology. Achieving cloud-native software development involves ensuring that the development environment in the cloud aligns seamlessly with the automotive edge environment. Moving to a cloud-based system, where software can be developed in the cloud and then distributed to an SDV at the edge, is known as cloud-native automotive development. Developers could develop and test software applications from any location using cloud and then securely deliver them to the car. The concept of creating and executing applications in order to make use of the distributed computing capabilities provided by the cloud delivery model is referred to as cloud-native. Applications that are cloud-native are created to take advantage of the size, elasticity, resilience, and flexibility that the cloud offers. With thecloud-native technology, it is possible to create callable applications on public, private and hybrid clouds. OEM’s aspiration to develop new software features with adaptability, and to supply vehicle services that are upgradeable over the vehicle life cycle are also supported by the cloud-native SDV.
In the context of SDV, “environment parity” refers to the concept of ensuring that the applications and services should function in the same way in both development platform and the embedded system of the target vehicle. In terms of software development and testing, environment parity means that the software is developed and tested in an environment that closely replicates the actual properties of the physical hardware in which it will run ultimately. This allows the early detection of issues and helps to debug these problems before reaching the production stage. Environment parity reduces the hardware dependencies which in turn accelerates the development and testing stages of the vehicle software. This concept helps OEMs to completely focus on developing the software rather than complexities arising due to the physical hardware, their interactions, and their integration. This will improve the safety, reliability, and robustness of the software, leading to the creation of more efficient vehicles.
How to bring in environmental parity with Cloud technology?
The concept of environment parity and cloud native technology is demonstrated here using:
- Quick Emulator (QEMU): It is a machine emulator and ECU virtualization tool that allows to run the same embedded binary/hex file that runs inside the microcontroller in a PC-based environment.
- Docker: It is a containerization platform that allows to package the application into a container. This makes it easier to deploy and run the application in different environments.
- Amazon Web Services (AWS)
The architecture of the same is shown in figure 2.
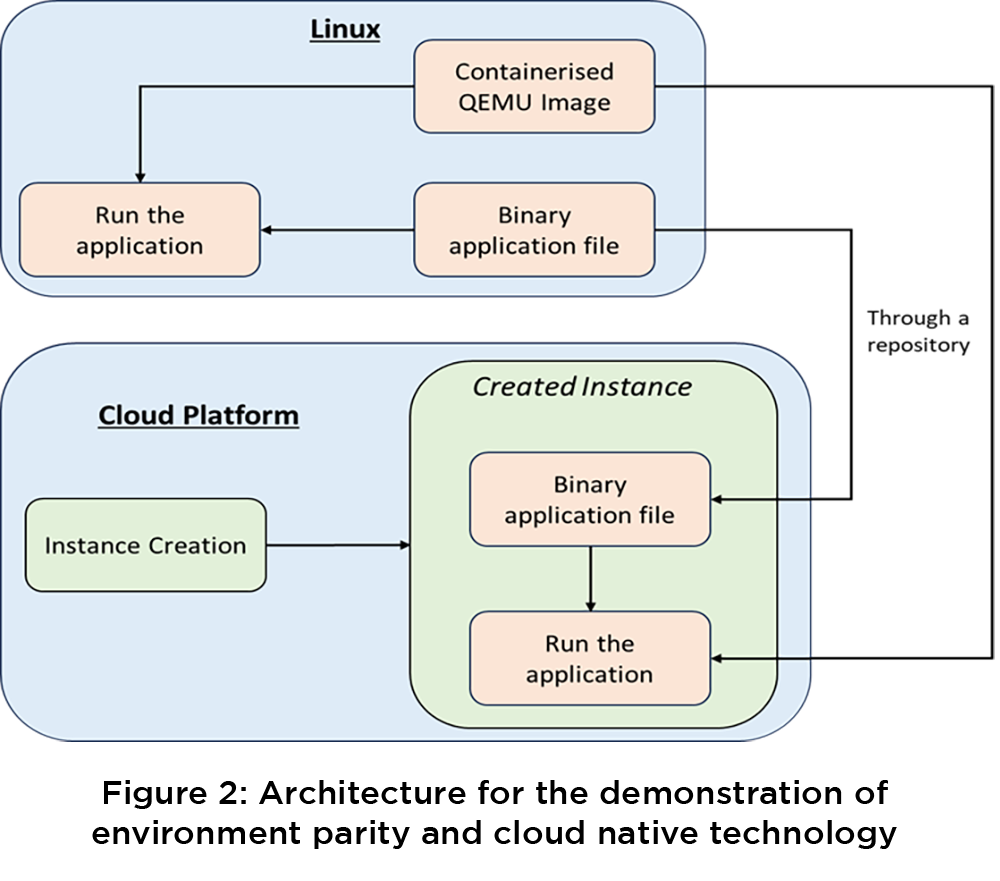
To demonstrate environment parity, initially containerization concept is executed on the Linux system using QEMU. For this, an image of QEMU is created using a containerization tool like Docker. Using this image, the binary file of the application specific for ARM64 microcontroller architecture is executed on the Linux system. This showcases the environment parity concept as another microcontroller architecture specific application was able to run on a Linux system.
To demonstrate the cloud native technology, AWS cloud platform is used. In this cloud platform, an EC2 instance is created and launched. The executable file of the application is then transferred to the EC2 instance. Similarly, the QEMU image file is also downloaded into the EC2 instance. Later, using the QEMU, the binary application file is executed in cloud. This exhibits the cloud native technology as the binary application is now executed using virtualization tool on the cloud platform.



